

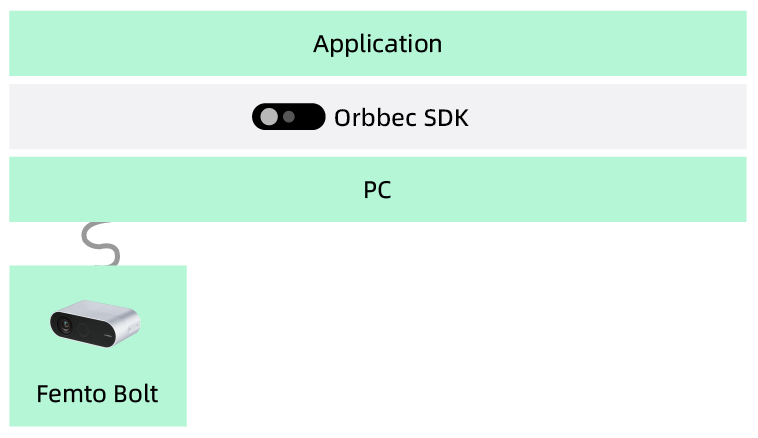
也可直接使用Orbbec SDK,使用Orbbec SDK 的系统框图如下:
关于Femto Bolt
本文内容
● Orbbec SDK 和 Orbbec SDK K4A Wrapper
● 人体骨骼跟踪 SDK/span
● Femto Bolt 硬件要求
● 后续步骤
Femto Bolt 是奥比中光与微软联合打造的一款先进iToF 3D相机。其中深度相机采用了微软最新的先进ToF传感技术,拥有与微软AKDK深度相机完全一致的工作模式和性能表现。Femto Bolt 3D相机整合了包括多模式深度相机、彩色视频相机和惯性传感器在内的多种感知方式,通过单条USB Type-C连接,即可同时实现数据传输和对相机供电。同时Microsoft推荐使用Femto Bolt作为Azure Kinect DK的替代选择。详情可参阅:Microsoft’s Azure Kinect Developer Kit Technology Transfers to Partner Ecosystem。Femto Bolt可在Femto Bolt 购买链接中购买。
Femto Bolt开发环境由以下多个 SDK 组成:
● 用于访问设备的Orbbec SDK 或者 Orbbec SDK K4A Wrapper。
● 用于跟踪 3D 人体的人体跟踪 SDK。
此外,可将认知视觉服务与设备 RGB 相机配合使用,使用Orbbec SDK K4A Wrapper的系统框图如下:
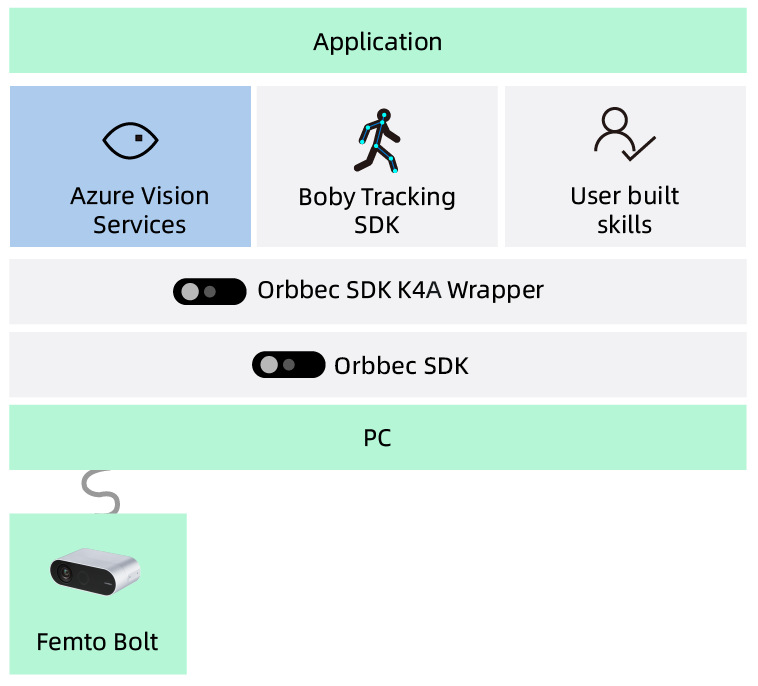
注: 只使用Orbbec SDK 而不使用 Orbbec SDK K4a Wrapper 不能使用AKDK的骨骼跟踪算法。
Orbbec SDK 和 Orbbec SDK K4A Wrapper
Orbbec Femto Bolt是Microsoft Azure Kinect DK的可靠替代产品,我们为此产品提供了两套SDK:Orbbec SDK和 Orbbec SDK K4A Wrapper。
由于Orbbec无法提供原有AKDK开发工具的升级及维护,从长期角度来看,我们推荐您尽快尝试和使用Orbbec一直在维护和更新的Orbbec SDK。使用Orbbec SDK搭配 Femto Bolt,您将得到更加丰富且强大的功能。
为帮助已经使用K4A开发了应用的用户可以更加快速上手Orbbec Femto Bolt,并实现对Microsoft AKDK的无缝替换。我们在Orbbec SDK的基础上封装了最大限度兼容K4A API的Orbbec SDK K4A Wrapper。使用该Wrapper,用户基本可以做到不需要修改自己的应用代码。
Orbbec SDK 和 Orbbec SDK K4A Wrapper提供访问用于完成 Femto Bolt 硬件传感器和设备配置。
若要详细了解 Orbbec SDK 和 Orbbec SDK K4A Wrapper,请参阅使用SDK。
Orbbec SDK 功能
Orbbec SDK 是 Orbbec Femto Bolt 的原生 SDK,能够使用 Femto Bolt 的全部功能:
● 深度相机访问,分辨率、帧率控制(包括被动 IR 模式)。
● RGB 相机的访问,分辨率、帧率及图像效果控制(例如曝光、白平衡、镜像)。
● IMU(陀螺仪和加速度传感器)访问,不同采样率及量程控制。
● 深度和 彩色相机硬件同步及 SDK 侧的软件同步(基于数据帧时间戳进行匹配实现软同步),相机之间的延迟可配置。
● 外部设备同步控制,设备之间的延迟偏移量可配置。
● Free Run 模式可实现深度和彩色相机不同帧率配置。
● 用于处理图像分辨率、时间戳等的相机帧元数据访问。
● 设备校准数据访问。
● 彩色图像格式转换、点云数据生成等实用 Filter。
● 与 彩色对齐的深度数据流输出(即 D2C,输出的深度坐标系及图像分辨率与 RGB 一致)
● 完整设置信息获取(设备名、固件版本、SN、设备温度等)
● 数据录制功能支持数据压缩。
● C / C++ 原生 API 及 Python、ROS1、ROS2、Android 等不同语言或系统 wrapper
此外,Orbbec SDK 还支持目前奥比几乎所有主流相机。
Orbbec SDK K4A Wrapper功能
Orbbec SDK 和 Orbbec SDK K4A Wrapper 提供以下功能,这些功能一经安装即可在 Femto Bolt 上运行:
● 深度相机访问和模式控制(被动 IR 模式,以及宽视场和窄视场深度模式)。
● RGB 相机的访问和控制(例如曝光和白平衡)。
● 运动传感器(陀螺仪和加速度传感器)访问。
● 同步的深度 RGB 相机流,相机之间的延迟可配置。
● 外部设备同步控制,设备之间的延迟偏移量可配置。
● 用于处理图像分辨率、时间戳等的相机帧元数据访问。
● 设备校准数据访问。
Femto Bolt SDK 工具
Orbbec SDK K4A Wrapper 中提供了以下工具:
● 查看器工具,可用于监视设备数据流和配置不同的模式。
● 使用 Matroska 容器格式的传感器录制工具和播放读取器 API。
人体骨骼跟踪 SDK
人体骨骼跟踪算法SDK使用的是微软的人体骨骼跟踪算法,即:Azure Kinect Body Tracking SDK。
在 Femto Bolt 硬件上使用人体骨骼跟踪算法,请参考:
Azure Kinect 人体跟踪功能
Femto Bolt支持接入Azure Kinect Body Tracking SDK,可获得与使用AKDK完全一致的人体跟踪功能和效果:
● 提供人体图像分割。
● 包含视野FOV范围的部分人体或全部人体的骨架。
● 提供每个人体的唯一标识。
● 可实时跟踪人体。
Azure Kinect 人体跟踪工具
将Femto Bolt接入Azure Kinect Body Tracking SDK后,可支持使用此SDK中的viewer tool,实现下述功能。
● 人体跟踪器提供一个查看器工具用于查看如何跟踪 3D 人体。
Femto Bolt 硬件要求
Femto Bolt 是奥比中光与微软联合打造的一款高性能iToF 3D相机。相机采用了与Azure Kinect DK相同的深度模块,延续了同样的深度模式与性能, 有关详细信息,请参阅硬件规格。
后续步骤
现在你已经对Femto Bolt有了初步的认识,接下来请深入了解其各项功能并进行相应的设置--快速入门:设置Femto Bolt!